
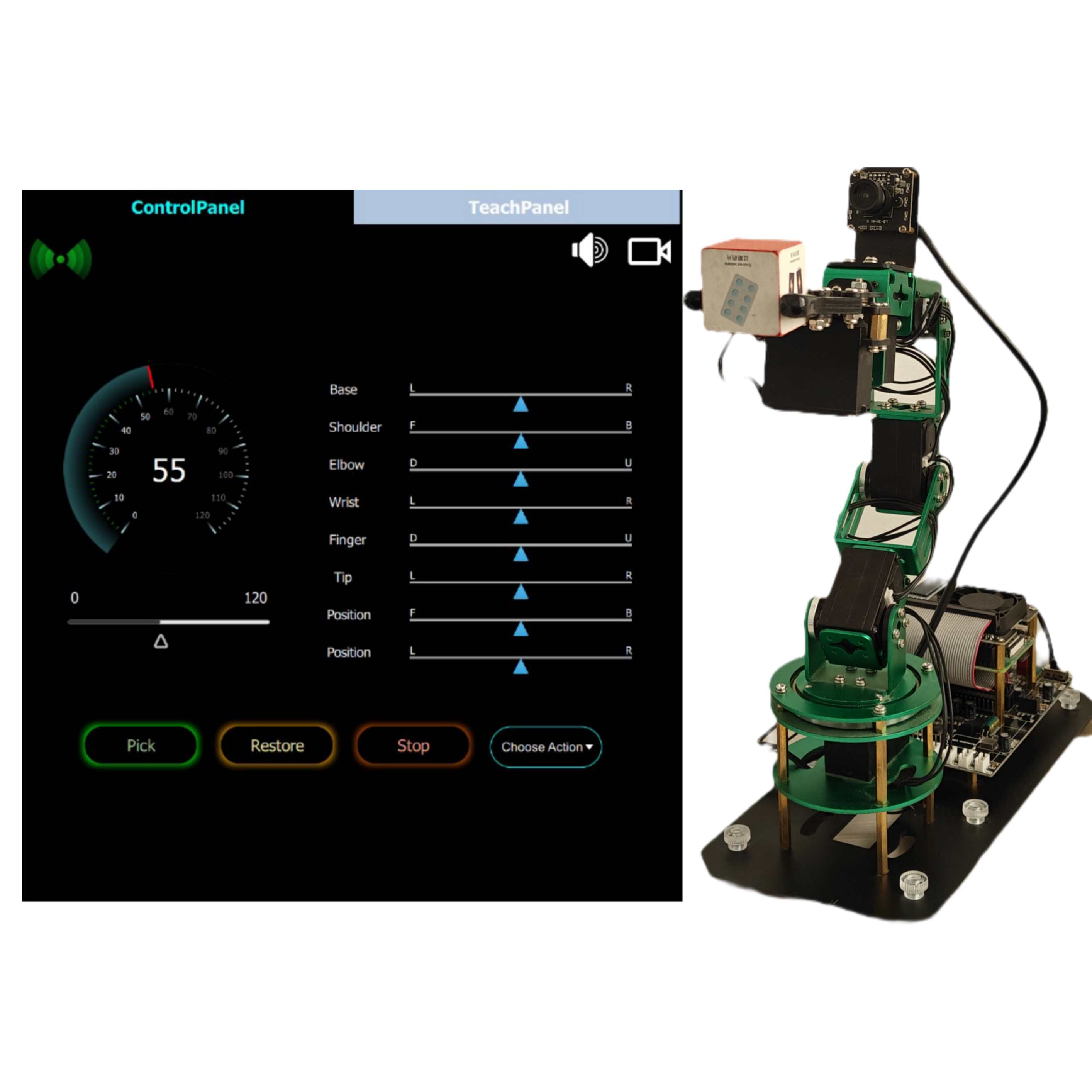
Controlling a six-axis arm efficiently requires seamless synchronization between real time feedback and simulation. Our developed dashboard, crafted using Qt C and QML, empowers users to manipulate the movements of a six-axis arm effortlessly. With real-time feedback displayed on the dashboard, users can visualize and fine-tune the arm's actions, enhancing precision and control. The dashboard facilitates individual axis control, allowing users to adjust speed and direction dynamically. Additionally, automation features enable users to train the robot for repetitive tasks, optimizing efficiency and productivity.